|
 
Etapa II
Realizarile etapei a II a proiectului au constant in:
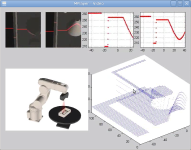
- Achizitia sistemului de scanare laser-dual pentru obiecte medii-mari cu caracteristicile tehnice: puterea semnalului de iesire: max 1mW, clasa II, lungimea de unda: 650-700 nm, dispersia razei laser: optic pasiva, fara piese in miscare, dispersie uniforma, distanta de scanare: min 65 mm max 245 mm, adancimea campului vizual: min 170 mm, lungimea liniei de scanare: min 30mm max 85mm, acuratete per punct: max 35 µm, rezolutie linie: min 450 puncte/linie, rata de esantionare cu campul maxim activat: min 20 000 puncte/ senzor/ secunda, min 40 000 puncte in total/secunda. Cuplarea mecanica a dispozitivului de scanare laser cu robotul industrial. Realizarea modulelor software de interfata si sincronizare intre software-ul de achizitie al dispozivului de scanare laser si controllerul robotului, controller robot si controller masa rotativa. Implementarea planificatorului miscarii sistemului compus robot-masa rotativa, pentru alinierea la strategia de comanda dezvoltata cu evitarea coliziunilor si a pozitiilor incomode ale bratului robot, avand restrictii asupra acceleratiei si vitezei mesei rotative.

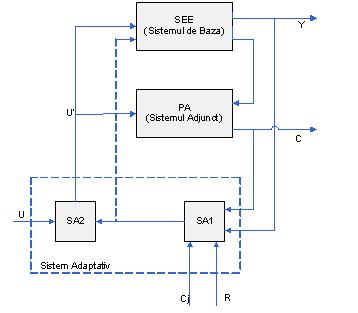
- Instalarea unui sistem de achizitie de date si monitorizare a procesului de frezare. Folosirea unui sistem adaptiv de control pentru masina unealta. Definirea algoritmului de optimizare neliniara a procesului de aschiere. Proiectarea unui modul care permite modificarea parametrilor tehnologici precum viteza de avans si de rotatie in timp real, la valori diferite de cele prescrise de programul masinii.
- Implementarea algoritmilor de reducere a erorilor datelor achizitionate cu dispozitivul de scanare laser. Implementarea algoritmilor de mapare a coordonatelor pixelului in coordinate reale Carteziene si ajustarea histogramei. Prelucrari morfologice ale imaginilor cu nivele de gri. Generarea traiectoriilor de prelucrare a uneltei aschietoare.
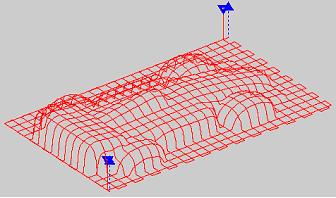
Simularea scanării 3D a interiorului unei matriţe
Detalii în:  ICCC 2008 Paper (PDF) ICCC 2008 Paper (PDF)
click to play
Sinteza Etapa II
Realizarile etapei a II sunt prezentate in: Etapa II
Rezultate livrate
- Documentaţie tehnico-economică pt. achiziţie
- Proiect tehnic
- Specificaţie de realizare
- Proiect tehnic
- Specificaţie tehnica a modulului de adaptare a regimurilor de aşchiere
- Proiect tehnic
- Model fizic suport
- Algoritmi si programe de comanda a braţului robot
- Raport ştiinţific
- Algoritmi şi sistem de programe pentru reconstrucţia 3D a modelelor obiect
- Raport ştiinţific de cercetare
- Studiu de performante
- Raport ştiinţific de cercetare
- Algoritmi şi tehnici de conversie in unitati SI
- Algoritmi şi programe de prelucrare morfologică.
|