|
 
Realizări - Etapa IV
Generarea traiectoriilor CNC cu controlul efortului de frezare
Detalii în:  IMS 2010 Preprint (PDF) IMS 2010 Preprint (PDF)
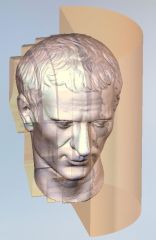
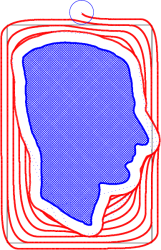
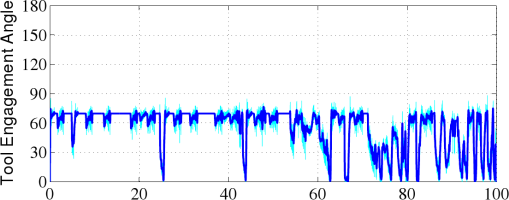
Traiectorie de frezare cu controlul unghiului de angajare al frezei
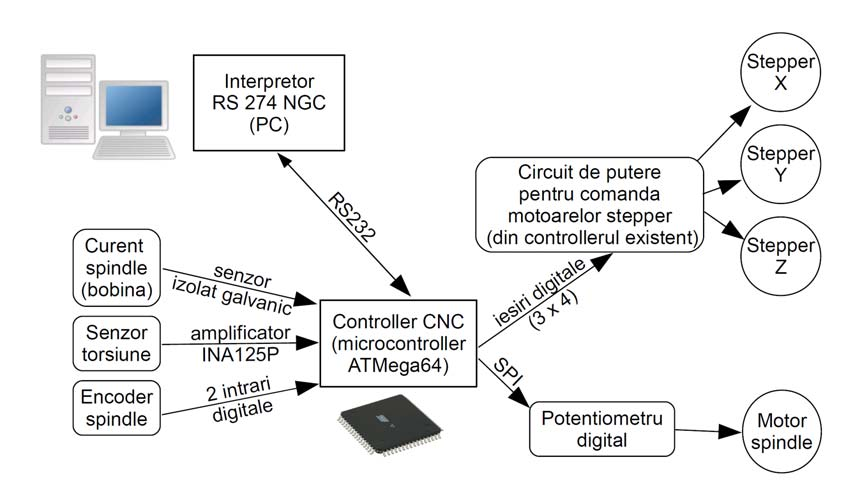
Arhitectura pentru controlul adaptiv al maşinii EMCO F1 CNC
Structura hardware propusă conţine următoarele elemente:
- Staţie de lucru PC
- Microcontroller pe 8 biţi - ATMega64
- Senzor de curent: CUIINC SCD05PUR, domeniul de măsură ±5A, izolat
galvanic
- Senzor torsiune: INTERFACE TS19 - punte Wheatstone, domenul de măsură
0-100 Nm, ieşire 0-15 mV la alimentare cu 10V
- Amplificator semnal (circuit specializat pentru instrumentaţie): Burr-Brown
INA125P (factor amplificare 100)
- Senzor de turaţie pentru arborele principal: encoder incremental de tip
cuadratura, CUIINIC MAG30
- Potenţiometru digital Microchip MCP41050
- Circuite de putere pentru comanda motoarelor (din controller-ul CNC existent)
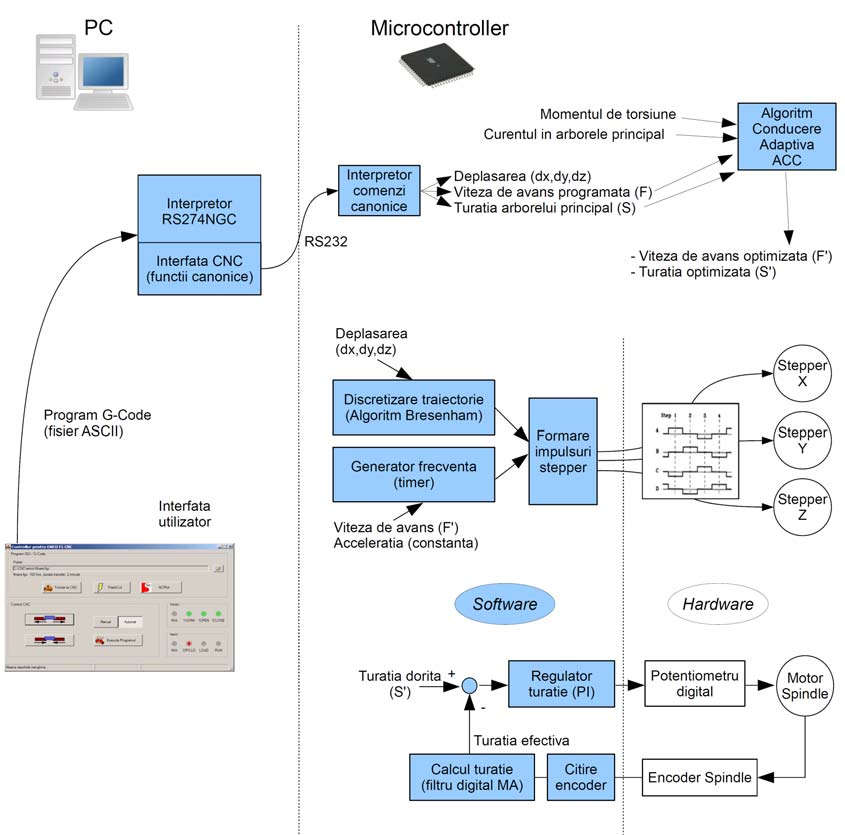
 Componentele software pot fi împărţite în două categorii:
Componentele software pot fi împărţite în două categorii:
- Software care rulează pe PC
- Interfaţa cu utilizatorul
- Interpretorul G-Code RS274/NGC
- Software care rulează pe microcontroller
- Interpretorul de comenzi canonice (interfaţa cu interpretorul G-Code)
- Algoritmul de conducere adaptivă ACC
- Modulul pentru generarea impulsurilor necesare motoarelor pas cu pas
pentru cele 3 axe (X/Y/Z)
- Bucla de reglare a turaţiei arborelui principal
Cerere de brevet
Sinteza Etapa IV
Realizarile etapei a IV sunt prezentate in: Etapa IV
Rezultate livrate
- Raport ştiinţific de cercetare
- Raport de testare
- Studiu tehnic
- Raport de cercetare privind tehnici de adaptare a regimurilor de aşchiere
- Cerere de brevet depusă
Titlul: Metoda, dispozitiv şi soluţie informatică pentru descrierea digitală exactă a suprafeţelor complexe şi complete 3D prin scanare robotizată şi generare a traiectoriilor de uzinare din reprezentări de tip hartă de profunzime
|