|
 
Etapa I
În cadrul etapei I s-a realizat dezvoltarea strategiilor de scanare pentru cele trei clase de obiecte vizate:
- Matrite
- Obiecte de arta de dimensiuni reduse
- Modele la scara redusa
Rezulta necesitatea proiectarii de strategii de scanare distincte pentru fiecare clasa de obiecte
Este importanta testarea acestora pe un simulator înainte de implementarea efectiva pe controller-ul robotului. Utilizarea unui simulator ofera o serie de avantaje, printre care:
• ofera posibilitatea de a efectua încercari fara a exista pericolul coliziunii accidentale dintre dispozitivul de scanare si piesa analizata;
• permite întelegerea în detaliu a procesului de triangulatie si a transformarilor necesare pentru a exprima masuratorile într-un sistem de coordonate unic atasat piesei;
• permite testarea strategiilor de scanare într-un mediu ideal, lipsit de perturbatii;
• permite analiza influentei tipului suprafetei (mata, lucioasa) asupra rezultatului scanarii
• permite proiectarea unei mese rotative care sa permita accesul bratului robotic în vederea scanarii complete a obiectului dorit
In aceasta etapa a proiectului a fost dezvoltat un simulator ce utilizeaza mediul de programare MATLAB împreuna cu mediul de randare tridimensionala prin metoda raytracing POV-Ray. Software-ul de simulare este alcatuit din doua module:
• Simularea dispozitivului de scanare cu laser si a unei strategii de scanare
• Simularea sistemului format din bratul robot, masa rotativa si obiectul analizat
Modulul pentru simularea dispozitivului de scanare cu laser este realizat în POV-Ray si ofera posibilitatea obtinerii imaginii înregistrate de captatorul CCD al camerei folosite de dispozitivul de scanare. Utilizarea programului începe prin definirea obiectului ce se doreste a fi scanat, fie folosind instructiuni POV-Ray, fie utilizând o aplicatie de modelare precum Moray, sau un program CAD tridimensional. Se pozitioneaza emitatorul laser si camera senzorului, apoi se specifica daca se doreste randarea folosind o camera externa (pentru a vedea asezarea în spatiu a elementelor de scanare si a obiectului scanat) sau folosind camera senzorului, care va capta imaginea care va fi folosita ulterior în vederea triangulatiei.
Triangulatia este realizata de o rutina scrisa în MATLAB, care, cunoscând asezarea în spatiu a emitatorului laser, a camerei, precum si caracteristicile camerei: distanta focala, dimensiunea captatorului si rezolutia acestuia, calculeaza coordonatele 3D ale fiecarui pixel care apartine razei laser vazuta de captor.
În urma apelarii repetate a modulului de simulare POV-Ray, prin modificarea coordonatelor dispozitivului de scanare, rutina MATLAB poate simula o strategie de scanare, pe care utilizatorul o introduce sub forma unui vector de pozitii si orientari consecutive ale dispozitivului de scanare.
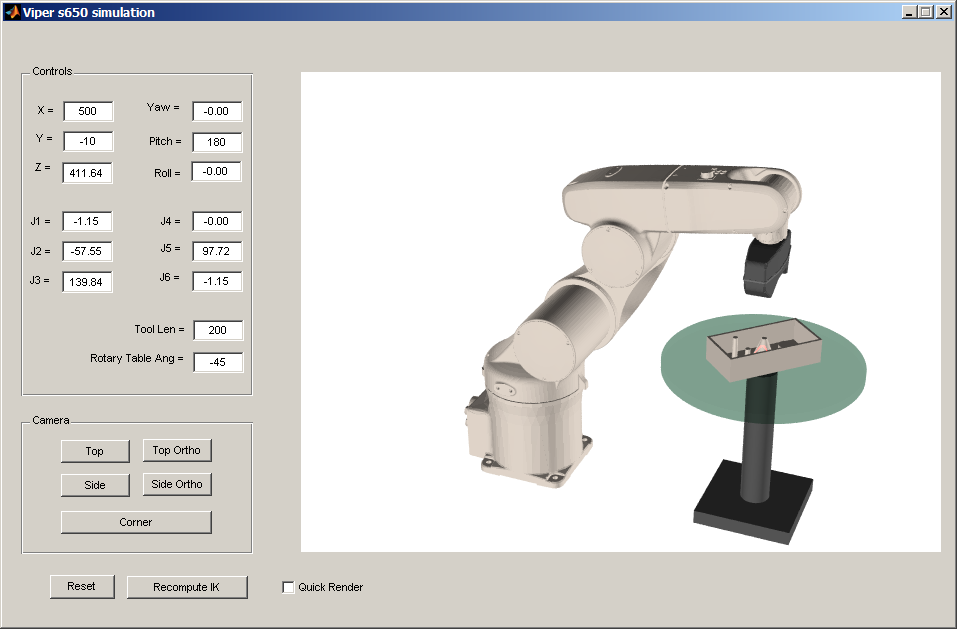
Modulul dezvoltat pentru simularea sistemului compus din bratul robot, masa rotativa si dispozitivul de scanare este prezentat în figura. Interfata cu utilizatorul permite specificarea coordonatelor dorite ale robotului Adept Viper s650, fie în sistem Cartezian World, caz în care se calculeaza cinematica inversa, fie prin introducerea unghiurilor din articulatii, caz în care se calculeaza cinematica directa. Este posibila de asemenea specificarea transformarii TOOL aplicate robotului si pozitia unghiulara a mesei rotative. Este posibila utilizarea a 3 unghiuri de vedere predefinite (din lateral, de deasupra si din perspectiva).
Acest modul permite obtinerea unei imagini de ansamblu asupra sistemului, înainte ca acesta sa fie implementat fizic, si permite dimensionarea si pozitionarea mesei rotative astfel încât robotul sa nu fie restrictionat în timpul operatiilor de scanare. De asemenea, modulul va fi util pentru testarea si depanarea rutinelor de evitare a coliziunilor.
Sinteza Etapa I
Realizarile etapei I sunt prezentate in: Etapa I
Simulări
Rezultate livrate
- Studiu de performanţe
- Raport ştiinţific-tehnic
- Metode şi algoritmi de aliniere a datelor 3D
- Raport ştiinţific
- Specificaţie tehnica de produs software
- Studiu tehnico-ştiinţific. Algoritmi de îmbunătăţire a imaginilor tip hartă de profunzime
- Raport ştiinţific
- Metode şi algoritmi de generare a curbelor de izonivel
- Comunicare ştiinţifică
- Metode si soluţii de optimizare a traiectoriilor de prelucrare în regim de finisare
|