|
 
Realizări - Etapa III
Scanare 3D pentru obiecte decorative

click to play
Detecţia şi urmărirea unei traiectorii complexe 3D folosind scanner-ul laser
Detalii în:  SYROCO 2009 Paper (PDF) SYROCO 2009 Paper (PDF)
click to play
Reproducerea pe CNC a obiectelor decorative scanate
 
(a) soldăţel (semifabricat: lemn)
(b) Cezar (semifabricat: alamă)
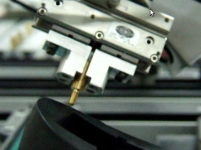
Scanarea pieselor montate pe axa rotativă a maşinii CNC
În figura de mai jos este prezentată o piesă semifabricat din de lemn,
montată pe axa rotativă a maşinii CNC. Piesa a fost scanată pe loc, acest lucru
fiind posibil datorită faptului că robotul poate lucra în interiorul maşinii numerice.
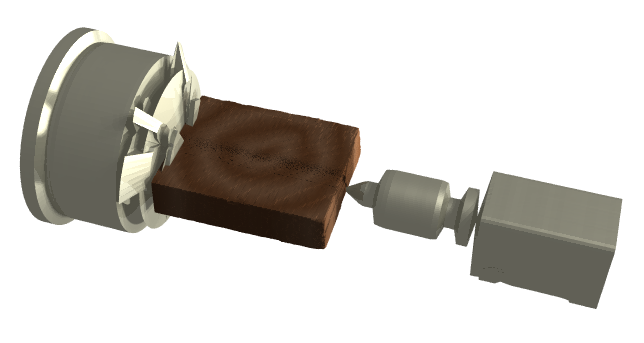
Figura este generată prin randare POV-Ray, rezultată în urma procesării datelor obţinute prin scanare.
Scanarea pieselor montate astfel are următoarele aplicaţii:
- Optimizarea şi automatizarea procesului de frezare:
- se cunosc dimensiunile exacte ale piesei semifabricat
- operaţiile de aliniere a CNC-ului pot fi executate automat
- se pot generara traiectorii de frezare evitând coliziunile
- timpul necesar fabricării pieselor unicat scade considerabil
- Controlul de calitate inline al pieselor realizate pe CNC
- Piesa poate fi verificată pe loc, imediat după prelucrare, fără a fi necesară mutarea piesei într-un post dedicat pentru inspecţie
- Din rezultatele inspecţiei se pot determina factori de compensare pentru CNC, astfel încât piesele următoare să fie executate cu precizie mai bună
|