|
 
2010
Collision and proximity avoidance for robust behaviour of real-time robot applications
Alexandru Dumitrache, Theodor Borangiu
The 19th IEEE International Workshop on Robotics in Alpe-Adria-Danube Region - RAAD'10,
June 23-27, 2010, Budapest, Hungary, pp. 241 - 246
Indexed by IEEE Explore,
ISBN: 978-1-4244-6885-0, DOI: 10.1109/RAAD.2010.5524577
 Paper (PDF) Paper (PDF)
 Presentation (PDF) Presentation (PDF)
 Video Video
Automatic Generation of Milling Toolpaths with Tool Engagement Control for Complex Part Geometry
Alexandru Dumitrache, Theodor Borangiu, Anamaria Dogar
The 10th IFAC Workshop on Intelligent Manufacturing Systems - IMS'10,
July 1-2, 2010, Lisbon, Portugal
Paper (PDF)
Presentation (PDF)
Video
An Integrated Robot Simulation Workspace for Real Time Collision Free 3D Laser Scanning Applications
Alexandru Dumitrache and Theodor Borangiu
Submitted to The Journal of Control Engineering and Applied Informatics (CEAI),
ISSN 1454-8658
Preprint (PDF)
Integrating 3D Quality Control Function into an Automated Visual Inspection System for Manufacturing Industry
Anamaria Dogar
UPB Scientific Buletin,
Series C: Electrical Engineering and Computer Science, Vol. 72, Issue 2, ISBN 1454-234x, pp. 63-76, 2010.
Paper (PDF)
Heuristic Solution for Constrained 7-DOF Motion Planning in 3D Scanning Application
Theodor Borangiu, Anamaria Dogar, Alexandru Dumitrache
Submitted to Control Engineering Practice,
manuscript number: CONENGPRAC-D-09-00229
Preprint (PDF)
Robotic Arms with 3D Vision Capabilities
Theodor Borangiu, Alexandru Dumitrache
Book Chapter in Advances in Robot Manipulators,
InTech, ISBN 978-953-307-070-4.
Book Chapter (PDF)
Visual Robot Guidance in Conveyor Tracking with Belt Variables
Theodor Borangiu, Florin Daniel Anton and Anamaria Dogar
THETA 17th edition - IEEE International Conference on Automation, Quality and Testing, Robotics (AQTR 2010),
May 28-30 2010, Cluj-Napoca, Romania, ISBN 978-1-4244-6722-8, pp. 243-248
Paper (PDF)
Open manufacturing control with agile reconfiguring of resource services
Th. Borangiu, S. Răileanu, D. Trentesaux, T. Berger
The 19th IEEE International Workshop on Robotics in Alpe-Adria-Danube Region (RAAD'10),
June 23-27, 2010, Budapest, Hungary, ISBN 978-1-4244-6884-3, IEEE Catalog Number: CFP1075J-CDR, pp 37-42
The Journal of Control Engineering and Applied Informatics (CEAI),
ISSN 1454-8658
Paper (PDF)
Semi-heterarchical agile control architecture with intelligent product-driven scheduling
Borangiu, Th., Raileanu, S., Berger, Th. and D. Trentesaux
Preprints of the 10th IFAC Workshop on Intelligent Manufacturing Systems (IMS'10),
Lisbon, Portugal, 1-2 July 2010, pp. 117-122
Paper (PDF)
The open-control concept for holonic manufacturing
Raileanu, S., Berger, Th., Sallez, Y., Borangiu, Th. and D. Trentesaux
International Journal of Mechanics and Control (JOMAC), Vol.11, No.01, 2010, International Journal of Mechanics and Control (JOMAC),
Vol.11, No.01, 2010
Paper (PDF)
Borangiu, Th., Răileanu, S., Trentesaux, D. and Th. Berger
Open Manufacturing Control with Agile Reconfiguring of Robot Services
The 19th IEEE International Workshop on Robotics in Alpe-Adria-Danube Region (RAAD'10),
June 23-27, 2010, Budapest, Hungary, ISBN 978-1-4244-6884-3, IEEE Catalog Number: CFP1075J-CDR, pp 37-42
Paper (PDF)
Vision System for Human Body Infrared Thermography
Ivanescu, N.A. and L. Ciupitu
The 19th IEEE International Workshop on Robotics in Alpe-Adria-Danube Region (RAAD'10),
June 23-27, 2010, Budapest, Hungary, ISBN 978-1-4244-6884-3, IEEE Catalog Number: CFP1075J-CDR, pp 353-356.
Paper (PDF)
Open Architecture for Robot Controllers
Borangiu, Th., Anton, F.D. and Silvia Anton
The 19th International Workshop on Robotics in Alpe-Adria-Danube Region (RAAD 2010),
June 23-25, 2010, Budapest, Hungary, ISBN 978-1-4244-6884-3, IEEE Catalog Number: CFP1075J-CDR, pp181-186.
Paper (PDF)
2009
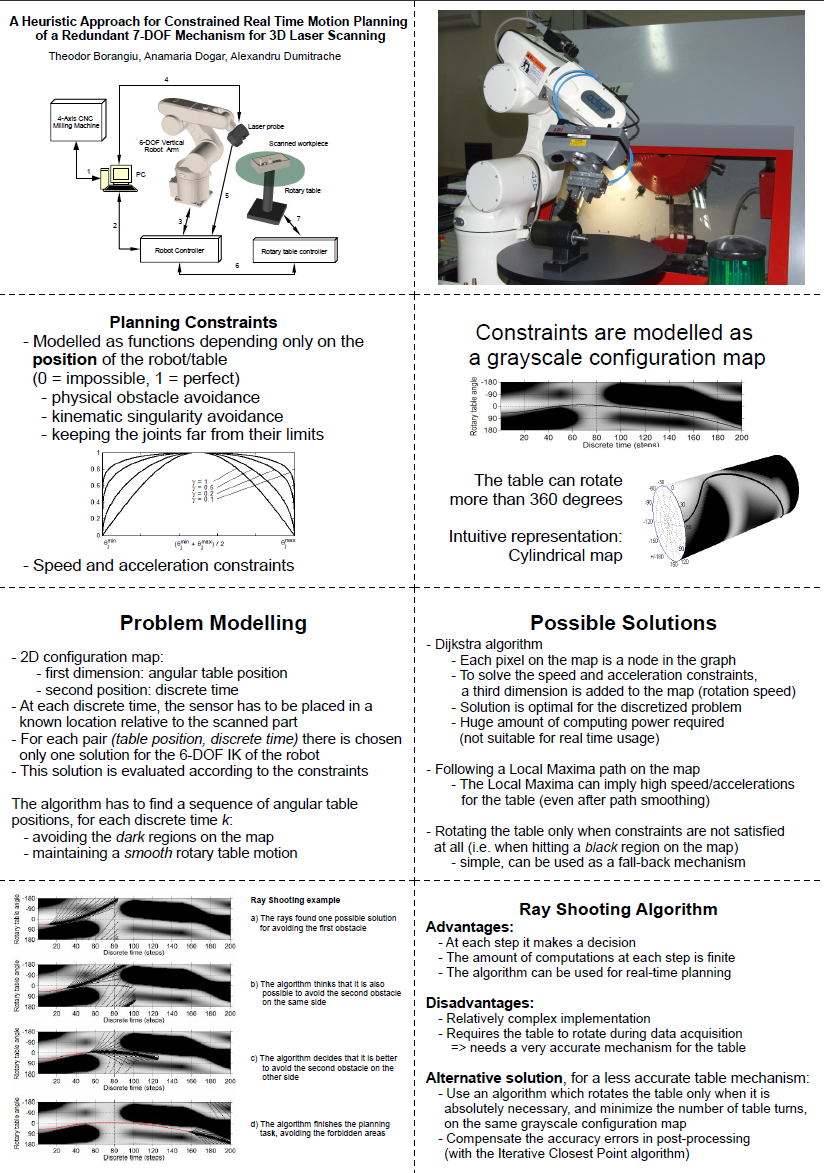
A Heuristic Approach for Constrained Real Time Motion Planning of a Redundant 7-DOF Mechanism for 3D Laser Scanning
Theodor Borangiu, Anamaria Dogar, Alexandru Dumitrache
13th IFAC Symp. on Information Control Problems in Manufacturing - INCOM'09,
Moscow, June 3-5, Russia
Information Control Problems in Manufacturing,
Volume 13, Part 1, 10.3182/20090603-3-RU-2001.0140
Paper (PDF)
Poster (PNG)
Calibration of Wrist-Mounted Profile Laser Scanning Probe using a Tool Transformation Approach
Theodor Borangiu, Anamaria Dogar, Alexandru Dumitrache
The 18th International Workshop on Robotics in Alpe-Adria-Danube Region - RAAD'09,
Book of Abstracts, ISBN 978-606-521-315-9, pp. 59,
Proceedings volume RAAD'09, ISSN 2066-4745,
Braşov, Romania, May 25-27, 2009,
Best Student Paper award
Paper (PDF)
Presentation (PDF, zipped)
3D scanning video
Flexible 3D Trajectory Teaching and Following for Various Robotic Applications
Theodor Borangiu, Alexandru Dumitrache, Anamaria Dogar
The 9th International IFAC Symposium on Robot Control - SYROCO'09,
Gifu, Japan, September 9-12, 2009
Paper (PDF)
Presentation (PDF, zipped)
Video: 3D trajectory following
A Service-oriented Architecture for Holonic Manufacturing Control
Theodor Borangiu
Book Chapter in Studies in Computational Intelligence,
Springer,
Vol 243/2009 - Towards Intelligent Engineering and Information Technology, pp. 489-503, ISBN 978-3-642-03736-8
Book Chapter (PDF)
Video
2008
Modelling and Simulation of Short Range 3D Triangulation-Based Laser Scanning System
Theodor Borangiu, Anamaria Dogar, Alexandru Dumitrache
Proc. of the International Conf. ICCCC'08,
May 15-17, 2008, Baile Felix-Spa Oradea, Romania
Int. Journal of Computers, Communications & Control (IJCCC),
Vol. 3, No. Supl. Issue, pp. 190-195, ISSN 1841-9836, E-ISSN 1841-9844
Paper (PDF)
Presentation (PPT, zipped)
Video: 3D scanning simulation
Constraints-based Motion Planning for an Automatic, Flexible Laser Scanning Robotized Platform
Theodor Borangiu, Anamaria Dogar, Alexandru Dumitrache
Proc. of IEEE Int. Conference on Automation, Quality and Testing, Robotics - AQTR'08 - THETA 16th Edition,
May 22-25, Cluj-Napoca, Romania, ISBN 978-1-4244-2576-1
Paper (PDF)
Presentation (PPT)
Implementation Issues Regarding a 3D Robot-based Laser Scanning System
Theodor Borangiu, Anamaria Dogar, Alexandru Dumitrache
Proc. of the Int. Conf. CONTROLO'08,
ISBN 978-972-669-878-4, pp. 52, July 21-23, 2008, UTAD, Vila Real, Portugal
Paper (PDF)
Presentation (PPT)
Integrating a Short Range Laser Probe with a 6-DOF Vertical Robot Arm and a Rotary Table
Theodor Borangiu, Anamaria Dogar, Alexandru Dumitrache
Proc. of the 17th Int. Workshop Robotics in Alpe-Adria-Danube Region RAAD08,
September 15-17, Ancona, Italy, ISBN 978-88-903709-0-8, pp. 14
Paper (PDF)
Presentation (PPT)
Generation of Adaptive Robot Scanning Paths for 3D Surface Reconstruction
Theodor Borangiu, Anamaria Dogar, Alexandru Dumitrache
Proc. of Int. Conf. ROBOTICA'08,
Vol. 15(50) Series A, Special Issue No. 1, Vol. 1, 2008, ISBN 978-973-598-387-1, ISSN 1223-9631, pp. 267-273, November 13-14, 2008, Braşov, Romania
Paper (PDF)
Presentation (PPT, zipped)
2007
Automatic Generation of 3D Machining Surfaces with Tool Compensation from Graylevel Image Models
Theodor Borangiu, Anamaria Dogar, Alexandru Dumitrache
The 8th IFAC Workshop on Intelligent Manufacturing Systems - IMS 2007,
May 23-25, Alicante, Spain, ISBN: 978-3-902661-23-4
Paper (PDF)
Presentation (PPT)
Videos:
CNC roughing, semi-finishing, finishing and final touch
Embedded Numeric-Adaptive Machining Control based on Data Fusion
Theodor Borangiu, Anamaria Dogar, Alexandru Dumitrache, Florin Daniel Anton, Silvia Anton, Nick-Andrei Ivanescu
Preprints of the IFAC Conference on Cost Effective Automation in Networked Product Development and Manufacturing - CEA 2007,
Monterrey, Mexico, October 2-5, 2007
Paper (PDF)
Continuous Path Following With Applications In Different Robotic Tasks
Theodor Borangiu, Andrei-Nick Ivănescu, Anamaria Dogar, Alexandru Dumitrache, Andrei Roşu
Proceedings of 16th Int. Workshop on Robotics in Alpe-Adria-Danube Region - RAAD 2007,
Ljubljana, Slovenia, June 7-9, 2007
Paper (PDF)
Visual Planning Using 3D Reconstruction in Intelligent Assembly Lines
Silvia Anton, Theodor Borangiu, Florin Daniel Anton
Proceedings of the 9th International Conference on Modern Information Technology in the Innovation Processes of Industrial Enterprises - MITIP 2007,
Florence, Italy, September 6-7, 2007.
Paper (PDF)
An Implementation of High Availability in Networked Robotic Systems
Silvia Anton, Theodor Borangiu, Florin Daniel Anton
Proceedings of the 4th International Conference on Informatics in Control, Automation and Robotics - ICINCO 2007,
Angers, France, May 9-12, 2007.
Paper (PDF)
Intelligent Job Shop Assembling With Holonic Robot Control
Theodor Borangiu, Florin Daniel Anton, Nick Ivanescu, Silvia Tunaru, Anamaria Dogar
Proceedings of the 16th International Conference on Control Systems and Compute Science - CSCS-16,
22-25 May, ISBN: 978-973-718-741-3, pg. 290-297, Bucuresti, Romania, 2007
Paper (PDF)
Trends of Manufacturing Automation in Romania
Theodor Borangiu
Proc. of the Austrian-Bulgarian Automation Days,
October 25-26, 2007, Sofia
Accepted for publication in The Scientific Bulletin of the Bulgarian Academy,
2008.
|

 Poster (PNG)
Poster (PNG)